


现在的位置:主页 > 综合新闻 >
Apollo智能交通一路走来的故事和思考
【作者】网站采编
【关键词】
【摘要】独家,提出一套车路协同的收益理论体系。 作者 | 利荣 车路协同的收益如何计算? 百度提出了一套收益理论体系,包括价值量化标准、价值逻辑推演体系、V2X解决问题实例。 9月14日,
 独家,提出一套车路协同的收益理论体系。
独家,提出一套车路协同的收益理论体系。
作者 | 利荣
车路协同的收益如何计算?
百度提出了一套收益理论体系,包括价值量化标准、价值逻辑推演体系、V2X解决问题实例。
9月14日,在2020 世界智能网联汽车大会上,百度智能交通产品研发总经理陶吉表示,这套理论体系提出来,就是衡量真正理想情况下,车路协同对自动驾驶的帮助。
陶吉称,简单来说,我们要测量一下有V2X时发生事故的概率和没有V2X发生事故的对比,这个比值代表了收益。V2X的覆盖率参数是C,解决问题的比例是X,解决了这些问题之后可以避免相应事故的概率是P。
得到的结论是,通过车路协同可以减少10-100倍的驾驶风险,无人驾驶事故率降低99%-99%。
以下是陶吉的演讲全文,雷锋网新智驾进行了不改变原意的编辑:
大家下午好,我的演讲分为三个部分:自动驾驶我们走到了哪里、我们为什么需要车路协同、从车路协同如何到智能交通新基建。
首先说一下自动驾驶技术。
过去几年,百度在自动驾驶专利和在加州平均接管公里数的排名,迅速从追赶者的位置到了领先者的象限,也代表了外界对我们的认可。
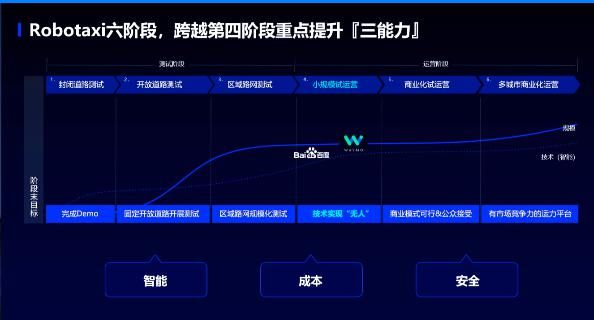 从内部来说,我们认为Robotaxi分为六个阶段,我们认为我们现在正处于第四阶段,而第四阶段末尾的关键指标就是去掉安全员,或者是把安全员从车上移到远端的安全中心。
从内部来说,我们认为Robotaxi分为六个阶段,我们认为我们现在正处于第四阶段,而第四阶段末尾的关键指标就是去掉安全员,或者是把安全员从车上移到远端的安全中心。
因此,要实现从第四个阶段顺利毕业,要做到如下三个方面:智能、成本、安全。
智能方面:数据闭环实践,高价值数据是关键。
 什么是高价值?
什么是高价值?
一是我们做的是L4级的Robotaxi,ODD是限定的,在限定的ODD范围内进行地毯式的数据搜寻是最有效果的,它比零散稀疏的采集更高效。
二是传感器配置,就是收集的传感器配置要和实现自动驾驶的传感器是一致的,这样才可以最有效的训练模型。
三是高质量的标注,我们看到机器学习、人工智能没有实现数据自闭环,没有实现自学习和无监督学习时,人工对数据的标注依然是非常重要的环节,这是我们谈数据时不可避免的话题。
最后,数据处理数量和车辆的异常行为关联是非常重要的,这种场景下的数据对我们最为关键,而不是单纯靠堆积数据量就可以获得。
此外,除了真实测试的数据收集,我们认为仿真也是非常重要的数据补充。
 我们目前已经积累了超过2.5亿公里的仿真历程,有超过1800万个仿真场景,日行历程达到160万公里。
我们目前已经积累了超过2.5亿公里的仿真历程,有超过1800万个仿真场景,日行历程达到160万公里。
成本方面:我们去年发布了Apollo Lite。
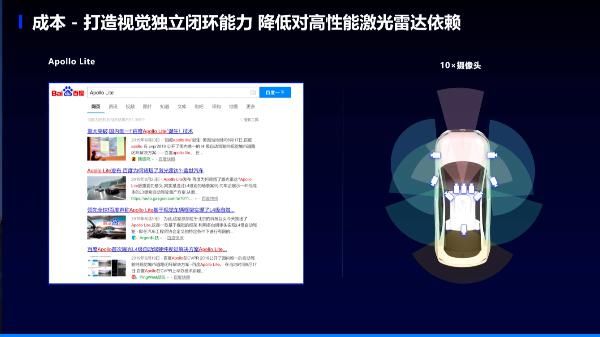 打造Apollo Lite这个系统并不是说要改变多传感器的技术路线,我们是希望通过对数据能力高压强的提升,使得它可以形成一个和激光雷达相对独立,相对冗余的系统,从而使得我们可以降低对高性能激光雷达的依赖。比如说现在Waymo新一代的激光雷达就非常大。
打造Apollo Lite这个系统并不是说要改变多传感器的技术路线,我们是希望通过对数据能力高压强的提升,使得它可以形成一个和激光雷达相对独立,相对冗余的系统,从而使得我们可以降低对高性能激光雷达的依赖。比如说现在Waymo新一代的激光雷达就非常大。
相信大家看过很多自动驾驶汽车在道路上行驶的视频,而这个视频的独特之处就是我们没有用到除了视觉传感器之外的任何传感器。
 这当中很难的点是各个角度上,二维的图像检测的障碍物首先要进行融合,你要判断不同的摄像头看到的障碍物是不是同一个障碍物。仅仅依赖这样的一个视觉系统,我们的车就可以行驶在非常复杂的城市道路,获得一个良好的表现了。
这当中很难的点是各个角度上,二维的图像检测的障碍物首先要进行融合,你要判断不同的摄像头看到的障碍物是不是同一个障碍物。仅仅依赖这样的一个视觉系统,我们的车就可以行驶在非常复杂的城市道路,获得一个良好的表现了。
仅仅有这个障碍物检测的视觉系统肯定不够,我们不可能穷举所有的没有见过的障碍物去训练模型,这个时候我们需要有一套冗余机制。
成本方面:视觉检测冗余,基于单目的最深估计。
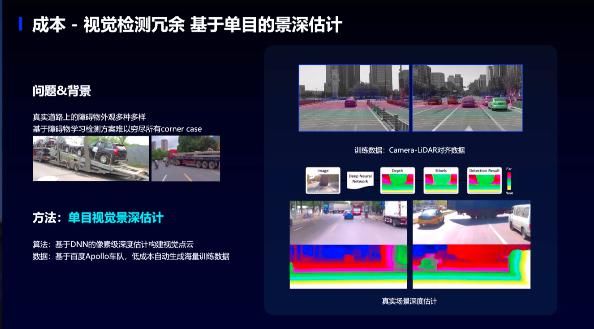 这是一套通过单目恢复出来的深度图,我们进行了一个自动化的联合标注,从而连了一个非常好的DNN网络,它可以把物体深度恢复出来,这样你看到一辆未知的车,比如说你看到一辆横着的大车,虽然你不知道它是什么,但是我知道我离它很近了,可以停下来。
这是一套通过单目恢复出来的深度图,我们进行了一个自动化的联合标注,从而连了一个非常好的DNN网络,它可以把物体深度恢复出来,这样你看到一辆未知的车,比如说你看到一辆横着的大车,虽然你不知道它是什么,但是我知道我离它很近了,可以停下来。
安全方面:无人化的关键是需要知道何时不行。
 我刚刚讲到第四阶段毕业的关键是无人化,而无人化的关键是需要知道我们什么时候不行了,如果说知道这一点,我们就把车交给安全员。这当中我们可以做三件事情:
我刚刚讲到第四阶段毕业的关键是无人化,而无人化的关键是需要知道我们什么时候不行了,如果说知道这一点,我们就把车交给安全员。这当中我们可以做三件事情:
文章来源:《商业故事》 网址: http://www.sygszzs.cn/zonghexinwen/2020/0923/645.html
上一篇:关于道德的故事300字
下一篇:进击的快手网红:花4亿投资上市公司,辛巴越来